
简介:
C2-M20&M22&M22(下简称 C2)高精度板卡板卡基于北云科技新一代 22nm 制程高性能车规级 gnss SOC 芯片 Alice,内置高精度测量引擎和导航引 擎,支持高性能 RTK 解算、抗干扰等功能,能够有效地应对卫星信号干扰、丢 失等苛刻环境,提供连续、实时、可信的高精度位置信息。
产品简介
1.1 简介
C2 高精度板卡基于北云科技新一代 22nm 制程高性能车规级 GNSS SOC 芯 片 Alice,内置高精度测量引擎、导航引擎,支持高性能 RTK 解算、抗干扰等功 能,能够有效地应对卫星信号干扰、丢失等苛刻环境,提供连续、实时、可信的 高精度位置与方向信息。可应用于无人机、农机、智能机器人等领域。 内置高精度全频点 GNSS 测量与定位引擎 采用 Bynav REAL (Ransac Enhanced Advanced Location) GNSS 定位引 擎,内置完好性监测算法,提高了城市环境中多径、干扰条件下的容错率和固定 成功率,定位解算结果更加稳健。 内置自适应抗干扰算法 针对复杂电磁环境中抗干扰的需求,对车载防跟踪设备、雷达、机场信号塔 等常见干扰信号,进行高量化位数的信号预处理与自适应干扰抑制,大幅提升动 态场景下高精度定位的可用性与完好性。
具备以下技术特点:
22nm 制程 GNSS SOC 芯片 Alice
深耦合组合导航(DR 精度可达 0.2%)*
全系统全频点 GNSS(1507 个通道)*
支持 NRTK/PPP/PPP-RTK/CLAS*
抗干扰抗欺骗
AEC-Q104
*可选
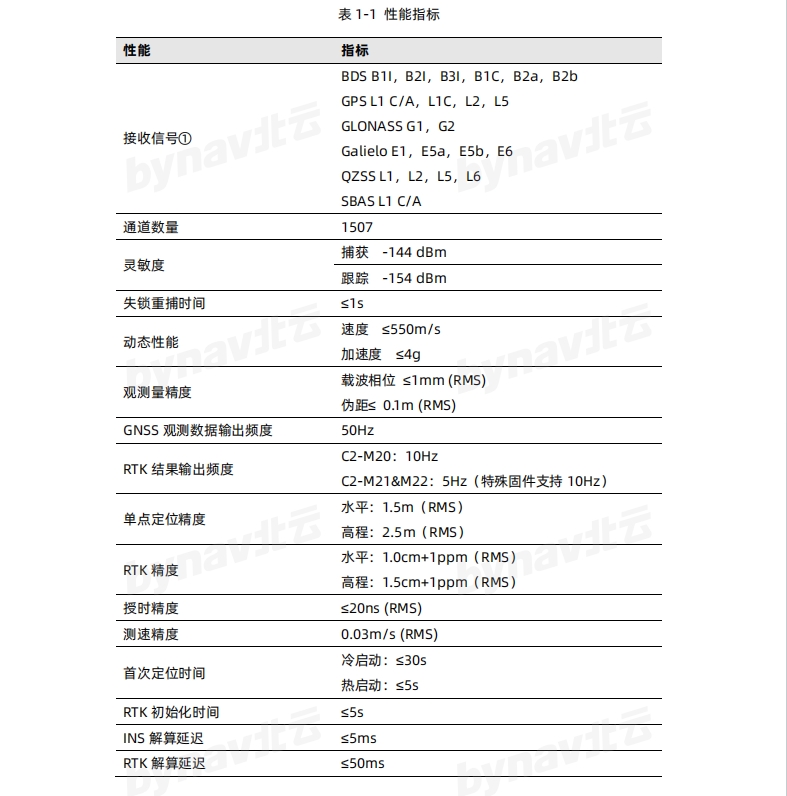
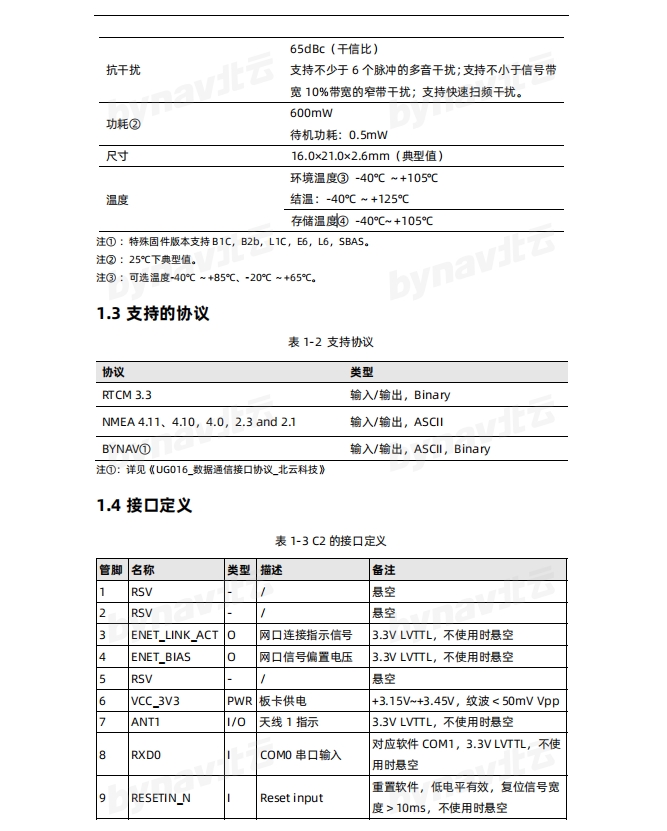
1.2 性能指标
2 安装 C2
本章介绍如何安装高精度定位板卡 C2。
2.1 工具准备
用户可以根据应用场景灵活组装北云科技交付的板卡。下图为使用北云科技 BY 系列载板的快捷安装示意图,也可使用其他的评估套件进行安装,方法类似。
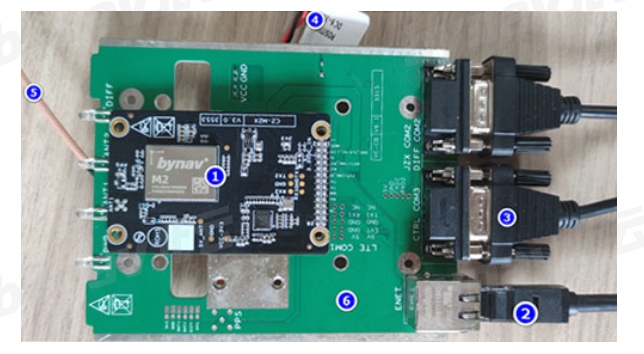
图 2-1 板卡连接示意图
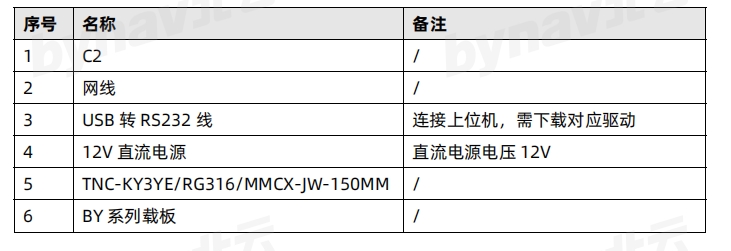
根据上面的连接安装示意图,需要提前准备如下工具:
表 2-1 BOM
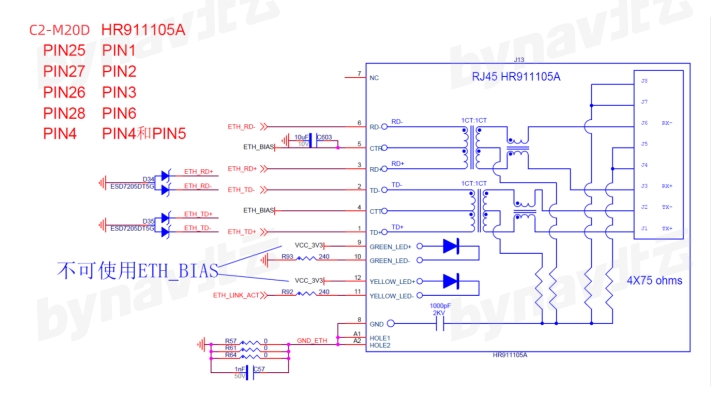
2.1.1 网口推荐电路
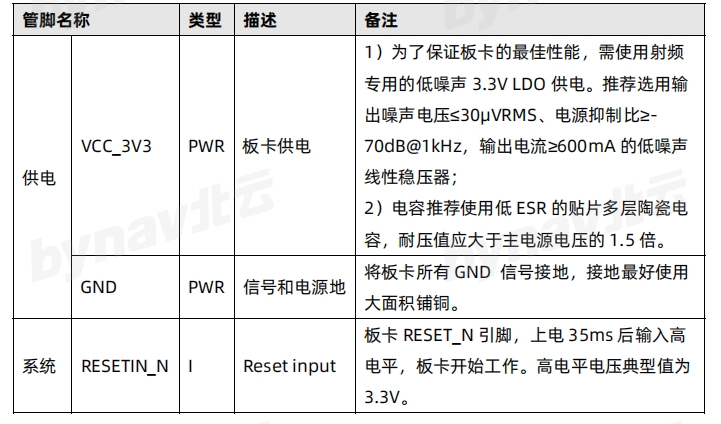
2.1.2 管脚注意事项
表 2-2 管脚注意事项
2.2 天线选型
C2 板卡的 ANT1 MMCX 接口提供+5V@100mA 的天线馈电。
使用的 GNSS 天线需为有源天线,要求典型增益为 28~40dB,工作频率需支 持 GPS(L1/L2/L5)、GLONASS(G1/G2)、BDS(B1/B2/B3)、Galileo(E1/ E5a/E5b)。 推荐天线噪声系数≤1.5dB,输出阻抗 50Ω。
2.3 射频同轴电缆规格
射频同轴电缆需与天线和接收机的阻抗匹配,特征阻抗为 50Ω,建议线缆衰 减小于 10dB。射频同轴电缆连接器一端适配 GNSS 天线,另一端为 MMCX-J 适 配 C2。注意,插拔 MMCX 射频头需要保持垂直,插拔方向不当或插拔次数过多 会导致射频头损坏或 MMCX 公头针折断。
2.4 电源规格
C2 要求电源输入范围为 3.15 V~3.45V,推荐值为 3.3 V。
2.5 连接关系 评估套件为板卡供电,引出板卡的接口,包括 3 个 RS232 串口、1 个网口, 通过扩展管脚可以引出 SPI、PPS 等接口,如 1PPS、LVTTL 电平串口等。评估套 件如下图所示:

2.7 连接通信设备
C2 可以使用串口和以太网与外部通信设备进行通信。
2.7.1 串口
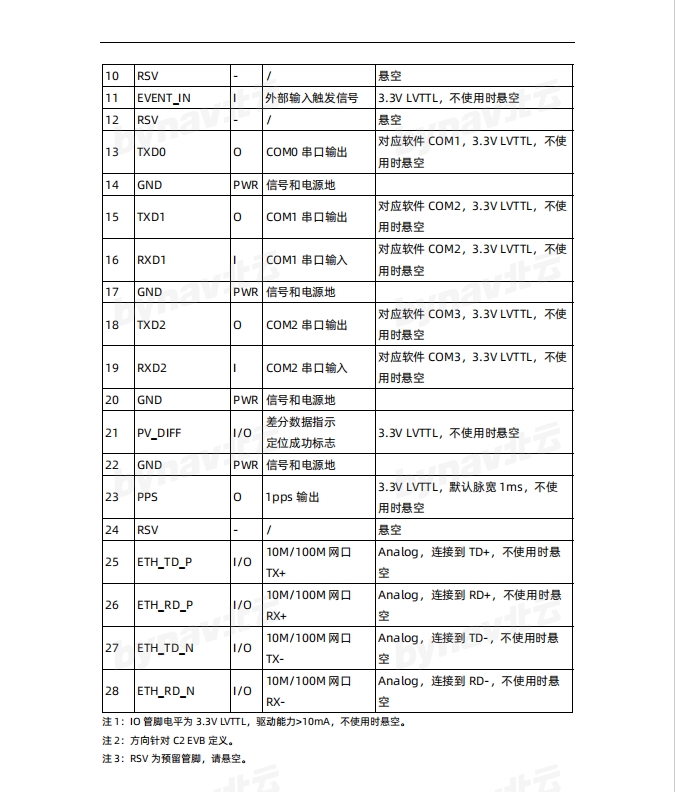
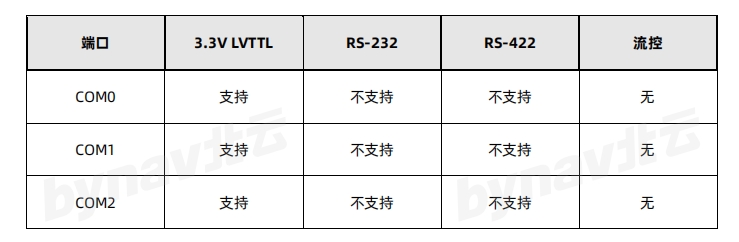
C2 提供了 3 个串口,引脚定义为 COM0、COM1 和 COM2,分别对应软件层 的 COM1、COM2 和 COM3。串口采用 3.3V LVTTL 电平,可通过 SERIALCONFIG 指令进行端口配置。
表 2-3 串口电平
2.7.2 以太网
C2 支持 10Base-T/100Base-Tx 自适应以太网,可用来与外部设备通信(如 电脑)。以太网端口支持 IPv4 网络层,TCP/IP 传输。用户可用作远程调试、接收 差分数据、输出位置姿态信息或升级固件等。 使用网线连接 C2 载板的网口与外部通信设备即可。
2.8 连接同步设备(可选)
C2 提供 EVENT_IN 和 PPS 作为同步信号。
2.9 检查运行状态
当 C2 安装完成后,连接电源,C2 上电启动,此时可发送指令 LOG VERSION, 若 C2 回复类似以下内容,说明已经开始工作,其中加粗部分的文字是固件版本号,设备版本号可能不相同: BDVER,V7.81_D54F63_T,23060202,23060714,2306078D,23060555, 23060503,,,23042601,23053102*2A
串口配置
在配置串口前,请确认已经按照前述完成安装和连接,C2 已经上电工作。配 置指令详情,请参考《UG016_数据通信接口协议》。
3.1 使用远程终端通信 C2 支持使用串口与远程终端通信,例如,将运行任意模拟终端软件的电脑作 为远程终端。仅需确保终端软件的串口配置和 C2 一致,通信建立后,即可使用电 脑存储导航数据等。
3.2 串口默认配置
在 C2 与电脑等设备建立串口通信前,需要合理配置 C2 和电脑的串口参数。
C2 的串口默认配置如下,可使用指令修改串口配置:
115200 bps
无校验位
8 bit 数据位
1 bit 停止位
表 3-1 串口号及配置指令

3.3 查询串口配置
查询指令为 LOG COMCONFIG,正常情况下,C2 将返回指令执行结果: <OK
[COM1]
COM1 115200 N 8 1 IN: AUTO OUT: AUTO
COM2 19200 N 8 1 IN: RTCM OUT: AUTO
返回信息描述了串口当前配置。第 1 行<OK 表示指令被正确识别并执行;第 2 行文字[COM1]表示当前使用的通信串口为 COM1;第 3 行表示 COM1 波特率 为 115200,输入输出协议均为 AUTO;第 4 行表示 COM2 波特率为 19200,输 入协议为 RTCM,输出协议为 AUTO。
如果指令未被正确识别或执行,则返回信息中将包含如下字样: <ERROR
3.4 更改波特率
可使用 SERIALCONFIG 指令更改串口波特率,示例如下。 ·
将 COM2 的波特率改为 115200,
输入指令: SERIALCONFIG COM2 115200
将 COM1 的波特率改为 921600 且使能偶校验,
输入指令: SERIALCONFIG COM1 921600 E
3.5 更改传输协议
可使用 INTERFACEMODE 指令更改串口传输协议,示例如下。
将 COM2 的输入输出协议均改为 AUTO,
输入指令: INTERFACEMODE COM2 AUTO AUTO
将 COM1 的输入协议改为 RTCM,输出协议改为 AUTO,
输入指令: INTERFACEMODE COM1 RTCM AUTO
4 以太网配置
本章介绍以太网的配置。在使用以太网连接 C2 前,需要通过串口对 C2 的以 太网端口进行配置。关于串口通信相关的内容,参见错误!未找到引用源。。
4.1 静态 IP 配置 C2 和电脑都需要被指定唯一的 IP 地址,一般在测试环境下使用静态 IP。当 C2 和电脑都配置好 IP 后,使用网线将二者连接。打开电脑上的网络测试工具, 即可测试 C2 的网络端口。
4.1.1 配置 C2 的静态 IP 地址
通过串口配置 C2 的 IP 地址的步骤如下:
搭建好测试环境,用 USB 转 RS232 串口线连接 C2 与电脑
使用电脑上的串口调试软件与 C2 建立通信,此连接用于向 C2 发送指令
指定通信所需的 TCP/IP 端口号: ICOMCONFIG ICOM1 TCP :1111
指定 C2 的 IP 地址,子网掩码和网关: IPCONFIG ETHA STATIC 192.168.8.151 255.255.0.0 192.168.8.1
*提示:
该指令给 C2 设置下面的值:
IP 地址 = 192.168.8.151
子网掩码 = 255.255.0.0
网关 = 192.168.8.1
保存网络设置: SAVECONFIG
输出 TCP/IP 配置: LOG IPCONFIG ONCE
配置电脑的静态 IP 地址,详见 4.1.2。
4.1.2 电脑静态 IP 配置—以 Windows 7 为例
按照以下步骤设置电脑的静态 IP 地址:
点击开始->控制面板 · 点击网络和共享中心
点击更改适配器设置,出现本地连接窗口
点击鼠标右键,选择属性,出现本地连接属性窗口
选择 Internet 协议版本 4(TCP/IPv4),点击属性按钮,出现属性窗口
点击使用下面的 IP 地址选项,然后输入 IP 地址、子网掩码和默认网关 *提示: 确保电脑的以太网设置能和 C2 的匹配上,
如可以设置: IP 地址 = 192.168.8.11
子网掩码 = 255.255.255.0
网关 = 192.168.8.1
点击确定按钮,出现本地连接属性窗口
点击关闭按钮,出现本地连接窗口
点击关闭按钮
确认以太网连接完成
4.1.3 确认以太网连接完成
使用网线连接电脑和 C2
使用任何支持 TCP/IP 的第三方终端程序连接 C2。
4.2 动态 IP 配置(可选)
动态 IP 一般用于正式环境,通过 DHCP 服务器连接电脑与 C2。
按照以下步骤设置动态 IP:
搭建好测试环境,用 USB 转 RS232 串口线连接 C2 与电脑
使用电脑上的串口调试软件与 C2 建立通信,此连接用于向 C2 发送指令
使用指令让 C2 从 DHCP 服务器获取动态 IP 地址: IPCONFIG ETHA DHCP · 指定通信所需的 TCP/IP 端口号: ICOMCONFIG ICOM1 TCP :1111
输出 TCP/IP 配置: LOG IPCONFIG ONCE
保存网络设置: SAVECONFIG
4.3 ICOM 通信
ICOM 是用于以太网连接的虚拟串口。可将其理解为 TCP/IP 协议簇的一个应用层协议。ICOM 的传输控制层协议可以使用 TCP 协议也可以使用 UDP 协议。 使用 DNSCONFIG 指令配置以太网的 DNS。若用 DHCP,DNS 将自动配置。
ICOM 的默认配置如下:
ICOMCONFIG ICOM1 TCP :1111
ICOMCONFIG ICOM2 TCP :2222
ICOMCONFIG ICOM3 TCP :3333
ICOMCONFIG ICOM4 TCP :4444
每个 ICOM 端口既可当做服务器(等待外部设备连接建立通信)使用,也可以 当做客户端(主动连接服务器的某个端口建立通信)使用。
5 EVENT_IN/PPS 配置
C2 提供 EVENT_IN 和 PPS 作为同步信号。
5.1 EVENT_IN 配置
外部设备可以使用 EVENT_IN 信号来同步 C2,一般用于连接里程计的脉冲信 号或 Camera、Lidar 等外部传感器的 Data Ready 信号,从而实现传感器之间的 同步。该管脚可以为外部信号打上准确的 GPS 时间戳,精度优于 20ns。 测试同步信号时,可将同步信号接入 EVENT_IN 管脚,然后使能输出该语句:
LOG MARK2TIMEA ONNEW
5.2 PPS 配置
C2 可以输出 PPS 信号同步外部设备,此脉冲信号的前沿与 GPS 时间同步, 在 GNSS 信号接收良好时,同步精度优于 20ns。可使用指令配置频率,脉宽和触 发沿等参数,例如,使能 PPS 输出,频率 1Hz,脉宽 50%,
上升沿触发: LOG MARK2TIMEA ONNEW PPSCONTROL ENABLE POSITIVE 1 500000
工作站模式配置
6.1 配置为基准站
6.1.1 配置方式一:恢复默认配置重启法
假设采用 com2 输出 RTCM 数据,且 com2 已连通,串口波特率匹配。 RTKTYPE BASE(设置为基准站)
SAVECONFIG(保存配置)
FRESET(恢复基准站默认配置)
RTKTYPE(查询和确认工作站模式)
LOG LOGLIST(查询当前正在输出 RTCM 数据的串口)
FIX AUTO(确认收星正常 1min 后发送此指令,固定基站坐标)
SAVECONFIG(保存修改)
REBOOT(重启设备使配置生效)
6.1.2 配置方式二:逐条配置法
假设采用 com2 输出 RTCM 数据,且 com2 已连通,串口波特率匹配。 · RTKTYPE BASE(设置为基准站)
LOG COM2 RTCM1074 ONTIME 1
LOG COM2 RTCM1084 ONTIME 1
LOG COM2 RTCM1094 ONTIME 1
LOG COM2 RTCM1114 ONTIME 1
LOG COM2 RTCM1124 ONTIME 1
LOG COM2 RTCM1006 ONTIME 5
LOG COM2 RTCM1033 ONTIME 10
UNLOGALL COM2(关闭 com2 当前的所有输出)
LOG COM2 GPGGA ONTIME 1(设置 GPGGA 1Hz 输出,可通过该语句 确认收星数和定位状态)
SAVECONFIG(保存修改)
LOG LOGLIST(查询输出语句)
6.2 配置为流动站
6.2.1 配置方式一:恢复默认配置重启法 假设需要从 com2 输入 RTCM 数据,且 com2 已连通,串口波特率匹配。
RTKTYPE ROVER(设置为流动站)
SAVECONFIG(保存配置)
FRESET(恢复流动站默认配置)
RTKTYPE(查询和确认工作站模式)
6.2.2 配置方式二:逐条配置法
假设需要从 com2 输入 RTCM 数据,且 com2 已连通,串口波特率匹配。 · RTKTYPE ROVER(设置为流动站)
LOG COM2 GPGGA ONTIME 0.2(设置 GPGGA 5Hz 输出,可通过该语 句确认收星数和定位状态)
(设置其它需要输出的语句)
SAVECONFIG(保存配置)
*注意: 如果使用 INTERFACEMODE 指令将通信端口的输入数据类型从默认的 AUTO 改 为其他 RTCM 后,部分指令将不能被识别或执行,需要再次使用 INTERFACEMODE 指令将输入数据类型改为 AUTO 或 BYNAV。
7 接收差分数据
差分数据是基准站传输给流动站用于提升定位精度的数据。数据格式一般使 用 RTCM 协议(RTCM 3.x 版本)。基准站是一个位置固定且已知的 GNSS 接收 机,被配置为输出差分数据给流动站。 流动站即高精度 GNSS 板卡 C2,需要不断地从基准站获取差分数据来计算当 前的准确位置。 差分数据可来自自建基准站,或租用的商业基准站。但两种方式均要求基准站 和流动站之间有数据链路来传输差分数据,常用方式有无线电、移动通信网等。
7.1 使用串口接收差分数据
输入协议为 AUTO 或 RTCM 的串口均可用来接收差分数据,确保 C2 和用来 转发差分数据的硬件设备或软件具有相同的波特率、校验位等串口配置即可。
7.2 使用以太网口接收差分数据
C2 可以使用以太网端口接入差分数据。
搭建好测试环境,用 USB 转 RS232 串口线连接 C2 与电脑
使用电脑上的串口调试软件与 C2 建立通信,此连接用于向 C2 发送指令
使用 C2 的电源线缆连接 C2 与电源
使用网线连接 C2 与服务器
使用静态或动态 IP 建立以太网连接
使用串口给 C2 发送以下指令:
ICOMCONFIG ICOM1 TCP <基准站 IP 地址> : <基准站端口号>
// 设置 C2 请求差分数据的网络地址,将虚拟串口 ICOM1 映射到该地址上
INTERFACEMODE ICOM1 AUTO AUTO
// 设置 ICOM1 的输入输出数据格式为 AUTO LOG ICOM1 BESTPOSA ONTIME 1
// 使能输出 BESTPOSA 定位语句,频率 1Hz(可选) SAVECONFIG
// 保存配置
*提示: · 使用 BESTPOSA 语句是为了确认 C2 处于 RTK 解算模式下。
数据采集
GNSS 解算结果由 GNSS 相关的语句提供。当高精度 GNSS 算法在正常工作 时,非 INS 相关的语句最大只支持 10Hz 输出,而 INS 相关的语句最大输出速率 和 IMU 速率相同。 *注意: 当输出大速率 INS 相关语句时数据量较大,为了保证数据完整性,建议输出 二进制格式的语句且使用网口进行数据传输,如果使用串口传输,请使用 SERIALCONFIG 指令将串口波特率设置为 921600,详情见 《UG016_数据 通信接口协议》。

发表评论 取消回复