
科学技术的快速发展,导航的应用十分普遍,组合惯导系统是一种综合应用惯性导航与全球定位系统的导航技术,具有高精准度和较强的使用性,尤其在航空航海以及导弹等领域有着重要应用,那么组合导航系统的基本原理有哪些与应用有哪些?
二、组合惯导系统的基本原理
组合惯导系统的基本原理是通过测量物体在空间中的加速度和角速度,然后根据这些测量值来计算物体的位置、速度和姿态角。其核心思想是惯性导航系统与GPS系统相互补充,从而克服各自的缺点,达到更高的导航精度和稳定性。
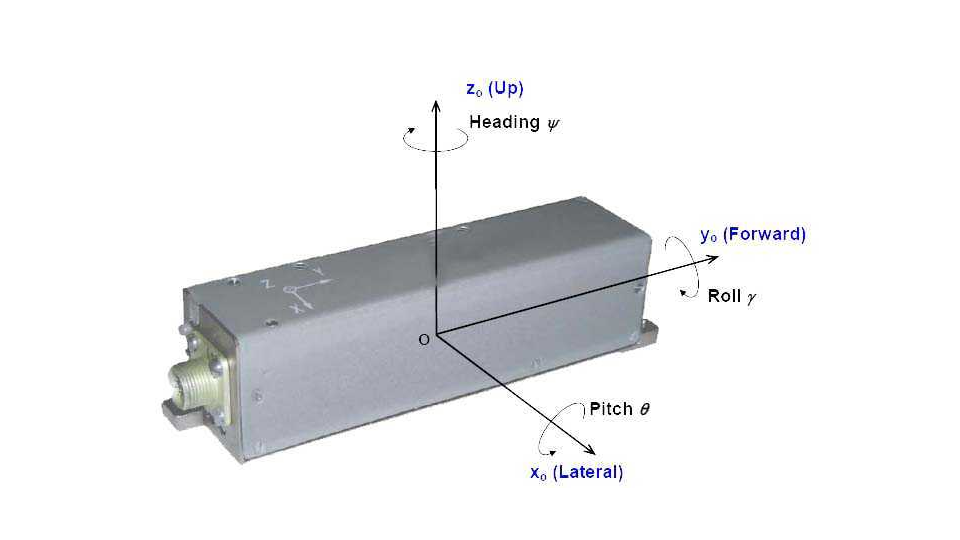
惯性测量单元(IMU): IMU通常包括加速度计和陀螺仪。加速度计用于测量物体的加速度,而陀螺仪用于测量物体的角速度。通过对加速度和角速度的积分,可以得到速度和位移信息。然而,惯性传感器存在漂移问题,随着时间的推移,积分误差会导致导航的不准确性。
全球定位系统(GPS): GPS是一种卫星导航系统,通过接收多颗卫星发射的信号来定位。虽然GPS可以提供高精度的位置信息,但在某些情况下,如在城市峡谷或密集树木覆盖的地区,GPS信号可能会受到干扰,导致定位不准确。
三、组合惯导系统的工作流程
组合惯导系统的工作流程如下:
数据采集: IMU测量物体的加速度和角速度,得到实时的惯性测量数据。
初始对准: 在开始导航之前,需要对组合惯导系统进行初始对准,以校正初始的测量误差。
数据融合: 将惯性测量数据与GPS数据进行融合,通过滤波算法(如卡尔曼滤波)来减小测量误差,得到更准确的导航信息。
持续更新: 组合惯导系统在运行过程中不断地融合新的惯性测量数据和GPS数据,以保持导航的准确性和稳定性。
四、应用领域
组合惯导系统在许多领域都有广泛的应用,包括:
航空航天: 在飞行器中,组合惯导系统可以提供精确的飞行状态和位置信息,有助于飞行器的自主导航、着陆和避障。
航海: 在海上导航中,组合惯导系统可以在没有稳定GPS信号的情况下,保持船只的准确导航。
导弹和火箭: 组合惯导系统对于导弹和火箭的精确制导和控制至关重要,可以在高速飞行中提供准确的导航信息。
车辆导航: 在城市峡谷或隧道等环境中,GPS信号可能不稳定,此时组合惯导系统可以提供稳定的车辆导航。
组合惯导系统作为一种应用于导航系统的导航技术,结合高精度定位模组M21在航海航空以及导弹等领域的应用十分普遍,通过融合高精度定位模组M21接收卫星信号数据和组合惯导系统提供高精度,实时性强的导航信息,为各领域提供准确的位置信息服务,高精度定位模组M21采用单天线全频设计,可接收所有卫星信号,M21集成 IMU 传感器的高精度惯导模块,适用于恶劣环境下的高精度 gnss 定位,多频段 GNSS 接收机可在几秒内达到厘米级精度,缓慢移动的服务机器人和电动滑板车的动态模型,允许选择任何 L-band GNSS 校正服务,易于硬件集成和配置。

发表评论 取消回复