
T1-8D/T1-FD内置C1高精度定位定向板卡,基于北云科技自研基带芯片Alita和射频芯片Ripley设计,采用北云新一代REAL(Ransac Enhanced Advanced Location)算法引擎,支持全系统、全频点、单/双天线信号接收和RTK解算。

T1-8D/T1-FD gnss高精度定位定向接收机内置C1 GNSS高精度定位定向板卡,壳体选用高品质镁铝合金,接收机外形美观,经久耐用,便于安装。能够为载体提供实时、连续、可靠的高精度位置、航向、速度和时间等信息。更智能的算法引擎,更高效的RTK 解算,以及更卓越的动态抗多径、抗干扰和抗遮挡性能。可广泛应用于自动驾驶、驾考驾培、精准农业、测量测绘、地灾监测、无人机、无人船、机器人、工程机械和轨道交通等领域。

产品特点:
- 基于Alita基带芯片和Ripley射频芯片设计;
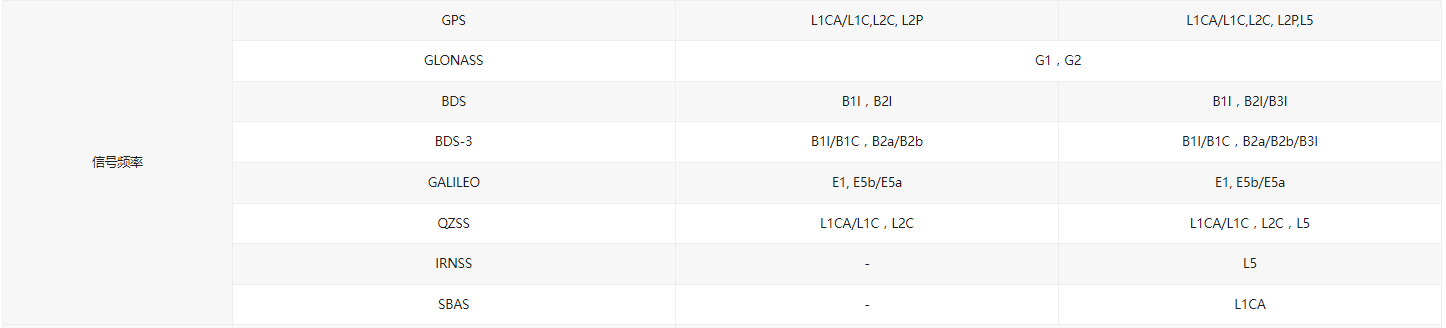
- 支持全系统全频点、单/双天线;
- 支持BDS-3、Galileo等现代化信号体制;
- 支持串口、以太网等多种物理接口;
- 超低定位解算延迟;
- 更卓越的动态抗多径、抗干扰和抗遮挡性能;
- 9~36V宽电压输入,具备过流和反接保护功能;
- 两个RS232串口,一个RJ45网口。

RAIM自主完好性监测技术
针对城市环境中多径干扰等引起的观测值异常,集成了基于 RANSAC (Random Sample Consensus)的完好性监测算法。该算法可以实时对伪距、载波相位和多普勒观测值进行监测。相对于传统的完好性监测算法,可以在异常卫星较多的情况下仍可以准确剔除故障卫星,提高了容错率,定位解算结果更加稳健。
历元差分平滑技术
利用前后观测历元的差分计算用户的位移,与RTK定位结果进 行融合处理,定位解算结果更加平滑。在参考站卫星受遮挡时,充分利用了流动站所有跟踪卫星参与解算。在差分数据较长时间中断时,仍能保持平滑的定位结果输出。
载波半周模糊修复技术
城市动态环境中,载波相位失锁和重新跟踪相对频繁。载波相位重新跟踪后, 一般 需要帧同步(Frame Sync)完成后才能消除半周模糊,然后用于整周模糊度解算。帧同步通常需要6s左右。T1系列产品集成了基于电文预测与匹配的载波半周模糊修复技术 (专利已授权),可以在卫星信号失锁重捕后,快速消除半周模糊,提高了卫星可用数,有效缩短了信号完全遮挡后的恢复时间。
性能指标:
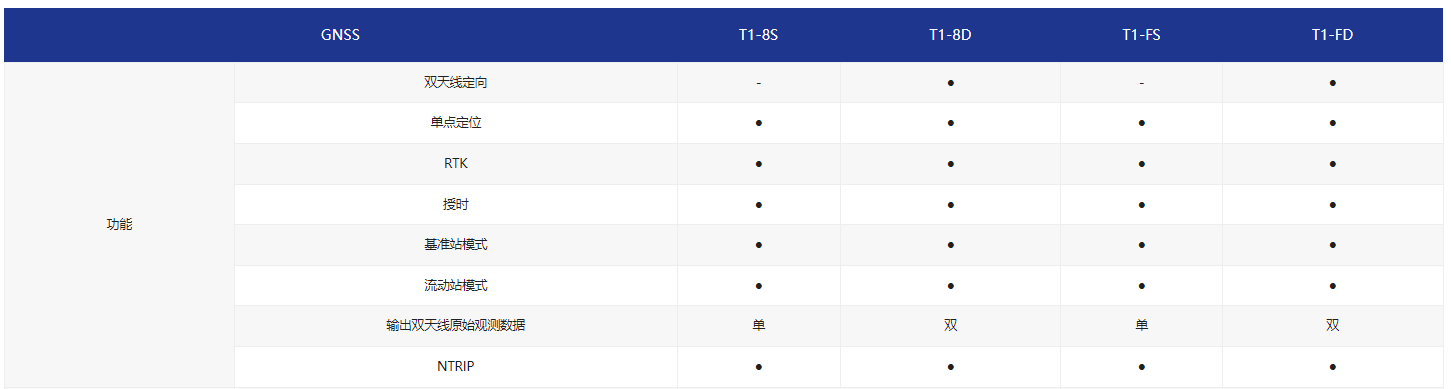
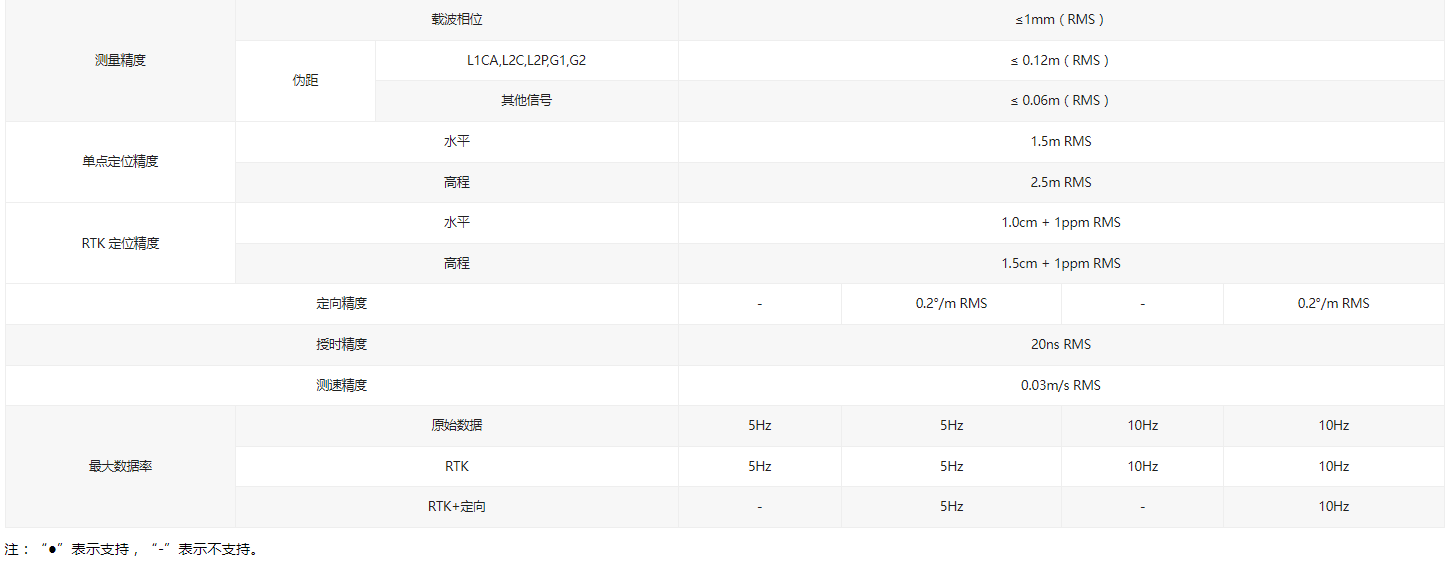
接收机特性:

选配附件:


发表评论 取消回复